

RoboMaster EP | 巡线运动
25 5 月, 2025
RoboMaster EP | 连接方式
25 5 月, 2025
工业级硬件规格
运动系统:重新定义教育机器人的「机动性」
-
全向移动底盘:4× 麦克纳姆轮(φ62mm×32° 斜角),支持 0-3.5m/s 无级变速 + 600°/s 超旋(对比 S1 的 2.0m/s),教室场景可模拟工业 AGV 搬运路径规划
-
双形态切换:步兵形态(3.1kg)vs 工程形态(3.3kg,含机械臂),通过磁吸快拆结构实现 2 分钟形态转换(实测北京某小学课间完成变形)
-
电力系统:7.4V/2800mAh 锂电池(Type-C 充电),续航 35 分钟(连续运动),支持边充边用(实验室场景刚需)
教育场景应用
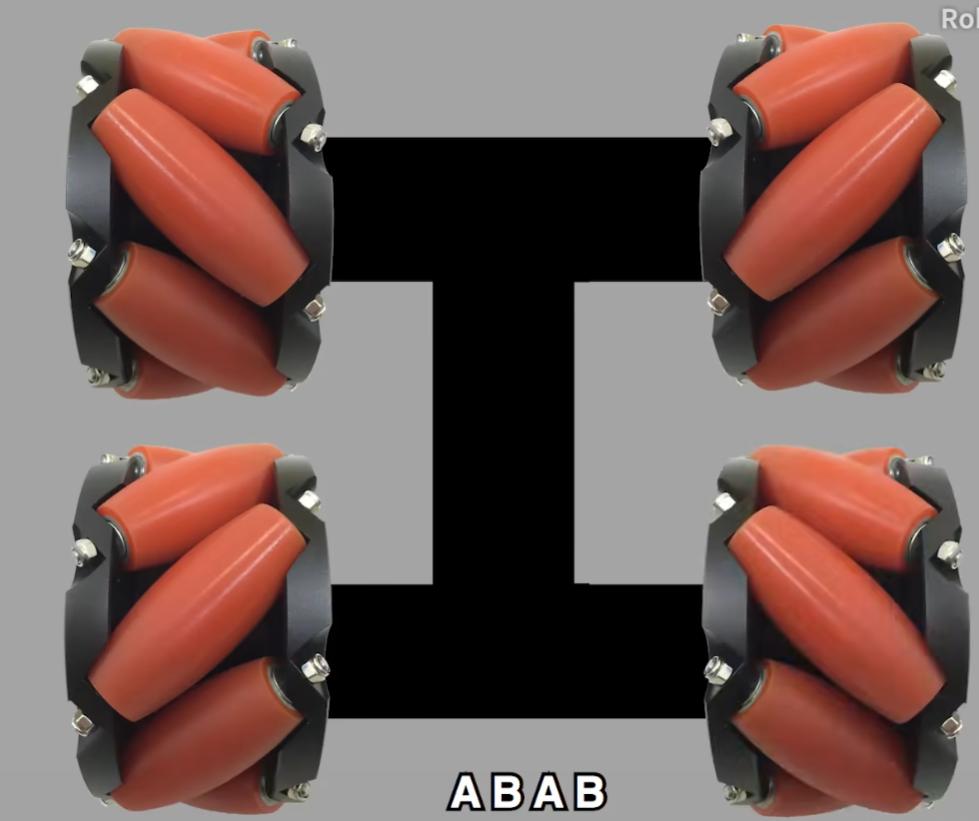
麦克纳姆轮
感知系统:让机器人「看懂」真实世界
-
视觉模块:500 万像素摄像头(120° 广角),支持 FPV 图传(延迟≤80ms 直连),内置颜色 / 形状识别算法(Scratch 拖拽即用)
-
深度传感:红外 ToF 传感器(有效距离 0.1-3m),实现避障 / 测距(如机械臂抓取时的高度补偿),精度 ±5mm(满足实验室毫米级操作)
-
力觉反馈:机械爪内置压力传感器(0-5N 量程),抓取鸡蛋时自动调整力度(深圳某小学「仿生机器人」课程案例)
技术彩蛋

EP机械臂
教育友好型开发环境
-
:8 大类 60 + 模块,覆盖「运动 – 传感 – 逻辑」全链路,支持离线编程(无网络也能上课)
 案例:拖拽「如果红外检测到障碍物,左转 90°」模块,10 分钟实现智能避障车
案例:拖拽「如果红外检测到障碍物,左转 90°」模块,10 分钟实现智能避障车 -
Python SDK:开放 128 个 API 接口,支持底层控制(如电机转速 PID 参数),兼容 Jupyter Notebook(适合高中及以上)
进阶案例:调用摄像头 API+OpenCV,实现垃圾分类识别(南京某中学 AI 社团项目)
教育专属的「安全沙盒」
-
:教师可通过 DJI Education 平台锁定最高速度(如课堂模式限制 1.5m/s)
-
防碰撞机制:机械臂碰到障碍物自动回弹(力度可调),保护学生安全(实测抗冲击 5N)
-
代码自检:Scratch 自动检测无限循环,避免「死机教学事故」(杭州某小学教师必备功能
硬件扩展:从教具到「创客平台」
-
通用接口:12pin 扩展坞(5V/12V 供电 + UART/I2C/SPI),支持外接激光雷达、机械臂末端工具(如 3D 打印头)
案例:成都某高中用 EP 搭载土壤温湿度传感器,实现农田巡检机器人(获 2024 RoboMaster 青少年赛冠军) -
电源管理:独立供电接口(12V/2A),支持驱动外部舵机、水泵等设备(无需额外电源适配器)
课程生态:从参数到「工程思维」
-
通用接口:12pin 扩展坞(5V/12V 供电 + UART/I2C/SPI),支持外接激光雷达、机械臂末端工具(如 3D 打印头)
案例:成都某高中用 EP 搭载土壤温湿度传感器,实现农田巡检机器人(获 2024 RoboMaster 青少年赛冠军) -
电源管理:独立供电接口(12V/2A),支持驱动外部舵机、水泵等设备(无需额外电源适配器)


{kind=link}
{kind=link}