
Robomaster EP | 结构
25 5 月, 2025
Robomaster EP | 参数规格
25 5 月, 2025
EP轮式机器人除了可以结合底盘和云台模块实现按特定线路移动,但在某些场地条件限制,或者运行路线中有较多障碍物阻挡的情况下,因为机器人需要多条转向和移动指令才能绕过一个障碍物,所以我们只使用这些指令完成运行到目的地的整套程序会比较繁琐。
在介绍EP轮式机器人的时候,我们曾经了解到EP的云台控制器集成了高清摄像头和测距传感器,因此在障碍物较多的场合,我们可以先在场地上设置机器人巡行的线路,然后编写程序实现机器人按识别的线路自动巡行直至到达目的地。那么,我们如何才能让机器人识别到这些路线呢?一下,我们将研究机器人巡线自动运行的实现方法。
自动驾驶汽车简介
自动驾驶汽车(Autonomous vehicles;Self-driving automobile )又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。在20世纪已有数十年的历史,21世纪初呈现出接近实用化的趋势。
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
自动驾驶汽车其实也是一台机器人,拥有感知、决策、控制等功能。而自动驾驶依靠车载摄像机、激光雷达等传感器去感知周围的环境信息,比如周围车辆信息、车道信息、行人信息、交通信号灯信息等。

特斯拉自动驾驶
EP识别线返回的列表信息说明
尽管EP机器人未具备自动驾驶的功能,但它却支持自动巡线驾驶的功能。如何让机器人一直沿着指定路线前进呢?首先要让机器人知道“线在哪”,需要通过传感器去获取线的位置信息。一般我们使用带有颜色或磁性的线,可以通过红外传感器、颜色传感器、磁力传感器或者摄像头来获知线的位置信息。机甲大师S1/EP是依靠摄像机去感知外界信息的。当我们打开摄像头,开启线识别,识别到的线的信息会返回到一个列表中。而这个列表信息,正是我们巡线的基础。巡线程序的实现,算法实现的参数输入,就是从这个列表中得到的。那么接下来,我们将详细说明识别到的巡线信息,即返回的列表信息各参数含义分别是什么。
我们编写程序,可以得到识别线返回的列表信息。同学们可以发现列表信息长度为42。细心的同学会发现,在FPV视角中,出现了10个点。这说明机器人识别到了10个点信息,如图所示。
识别到的10个点
点的信息
列表第一项如图红色框所示,其数值为10,这是机器人识别到的点的数量信息。
列表的第二项如图蓝色框所示,其数值为1,这是机器人识别到的线的类型信息。
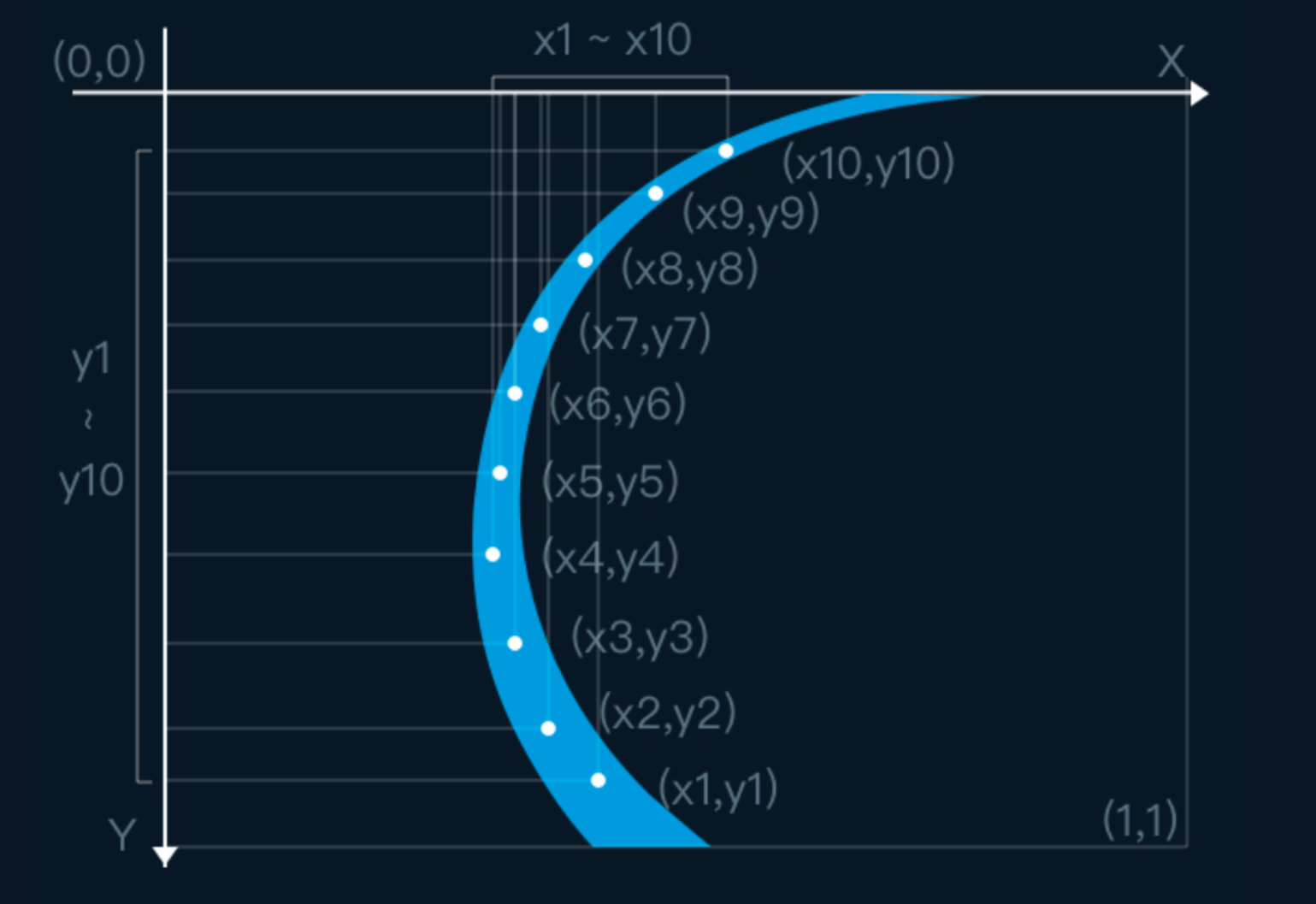
接下来列表信息的项是识别到的10个点的信息。每个点的信息为4个。例如,3~6为第一个点的信息,7~10为第二个点的信息,依此类推。那么每个点的信息分别是什么呢?每个点的4长度信息分别为点的横坐标、纵坐标、实际切线角、曲率。

列表内容
轮式机器人巡线基本原理
那么机甲大师S1/EP的巡线原理是什么呢?同学们不妨思考一下,平时我们是如何走直线的?是否在发现我们往左偏离的时候,我们会自动向右修正行走方向,这样才能走正,往右偏离的时候同理操作。所以,人工驾驶时我们是基于左右误差去修正我们的方向的。而机甲大师S1/EP也是通过类似的方式去实现巡线的。我们通过选取线上的一点,并使其保持在视野中央,我们可以利用横坐标误差去修正巡线方向,也可以利用实际切线角去控制航向轴转动来修正巡线方向。这就是机器人实现巡线的基本原理。
例如:列表第九项为第二个点的实际切线角,我们可以利用公式:
ω=kθ
式中 为云台旋转速度, 为自定比例系数, 为线上某点实际切线角。
也可以利用列表第七项,为第二个点的横坐标,我们可以利用公式:
ω=k(x-0.5)
式中 为云台旋转速度, 为自定比例系数, 为线上某点横坐标。
例如,当机器人的姿态如图6所示时,视野中心位置的十字符号为机器人云台的方向,为使得机器人沿着蓝线方向行进,需要控制云台向左旋转,才能将视野中心移动到蓝线上,进而能准确巡线。利用公式,0.5为视野中心的横坐标,此时云台旋转速度为负数,云台向左旋转,进而移动到蓝线上。
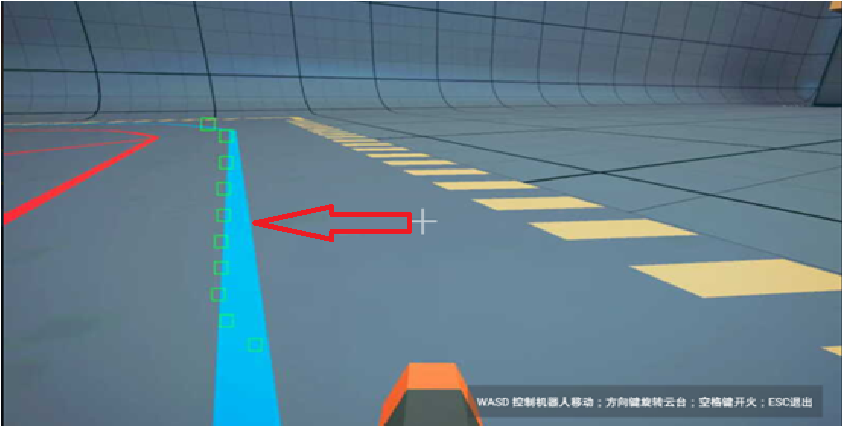
坐标计算
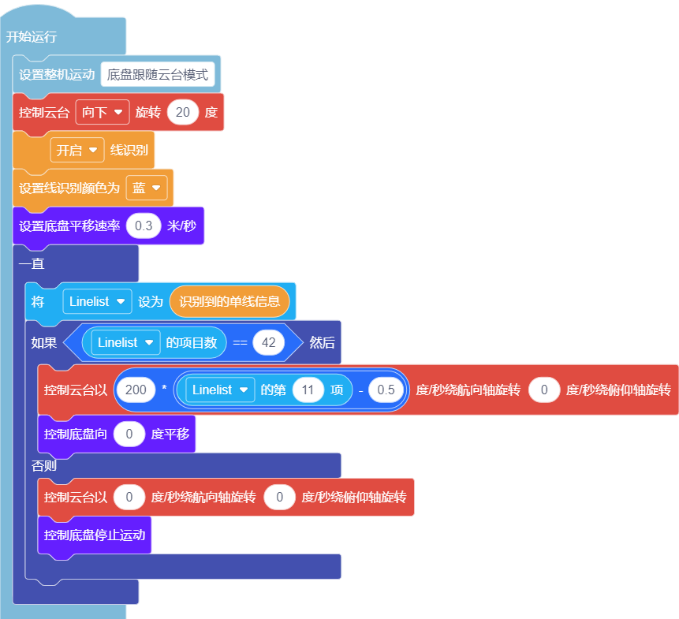
活动探究
打开大疆教育平台,创建程序,并启动模拟器,选择模拟器场景为基础训练。编程实现巡线任务。并和其他同学比一比,看看谁能又快又准的完成巡线任务。示例程序为带速度控制的巡线。
坐标计算


{kind=link}
{kind=link}