

RoboMaster EP | 连接方式
25 5 月, 2025
Python基础 | 安装
26 5 月, 2025
当仔细观察EP 机器人的底盘车轮结构时,我们发现EP 机器人的四个车轮的结构与普通汽车车轮并不相同,硕大的车轮是由多个倾斜分布的转子小轮构成的。而正因为这种车轮结构,使得EP 轮式机器人可以按任意角度移动,那为什么这种构造设计能实现以上的运动效果呢?以下就让我们一起探究EP 机器人的底盘运动的原理与操控方法吧。
机器人底盘
对于地面移动机器人来说,底盘是非常重要的执行器,通常位于机器人靠近地面的部分。
移动机器人用于移动的部分通常称为底盘,底盘的作用是负责机器人的运动和转向,是机器人的执行机构。
以下是几种常见的机器人底盘及其运动特性
-

- 波士顿动力腿足式机器人
-

- 极创机器人
-

- 轮式扫地机器人
-

- MorpHex 球形机器人
麦克纳姆轮的结构与受力分析
麦克纳姆轮简称麦轮,它是一种具有全向运动特性的轮子。是瑞典科学家Bengt Erlandilon 于上世纪70 年代在瑞典麦克纳姆公司发明的。
EP 机器人底盘采用麦克纳姆轮,是一款可以全方位移动的轮式机器人。通过不同轮子的不同旋转方向产生合力实现全向运动。
麦轮主要有轮毂、辊子和辊子轴构成,轮毂是支撑架,辊子沿与轮毂夹角45 度的方向平行排列。轮毂为主动轮(由电机驱动),辊子为驱动轮(受外力的作用
而产生转动)
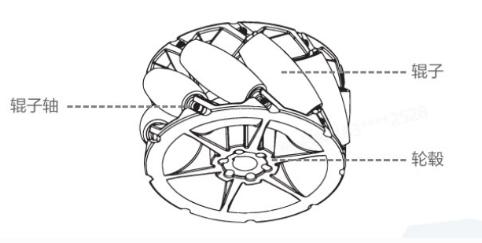
麦克纳姆轮根据夹角45°,可以分为互为镜像关系的A 轮(也称为左旋轮)和B 轮(也称为右旋轮)两种方向轮。辊子轴与A 轮正转时轮子受力方向为左前方,B 轮正转时轮子受力方向为右前方。
-

- A轮
-

- B轮
底盘模块说明
通过控制四个轮的转向和转速,我们可以让机器人实现前进、后退、加速减速等运动。接下来,我们将学习底盘模块的使用。底盘模块主要分为设置类和控制类。
-

- 开启或关闭底盘速度杆量叠加。
-

- 在“底盘跟随云台模式”下,当云台左右旋转时,底盘始终与云台保持指定夹角。
-

- 设置底盘平移速率,默认平移速率是0.5 米/秒。数值越大,移动越快。
-

- 设置底盘旋转速率,默认旋转速率是30 度/秒。数值越大,旋转越快。
-

- 控制底盘向指定方向平移某个角度。
-

- 控制底盘向指定方向平移指定时长。
-

- 控制底盘向指定方向平移指定距离。


{kind=link}
{kind=link}