
RobotIC赴三水中学开展交流学习活动
26 5 月, 2025
建设综合性机器人和人工智能教学实践平台
26 5 月, 2025

华南理工大学ROBOTIC战队科普组以竞赛为载体,以培养学员的科技素养、技术创新、团队合作和自主探究为目标,从基础知识、实践学习、竞赛学习三大方面,将机器人结构设计、机器人程序设计、传感器应用、人工智能应用、竞赛实践等五大模块设计了满足青少年各个年龄段基础、初级、中级、高级分段课程。
该课程体系涵盖多学科知识,将中学知识与大学知识串联起来,一定程度上弥补了当下基础教育与高等教育不连通的缺陷,有助于真正激发青少年学习兴趣、发挥青少年科技发展潜力、培养跨学科创新型人才。华南理工大学ROBOTIC战队科普组课程体系的提出和发展有利于加深青少年理论知识理解、将动脑与动手相结合、使他们真正感受到高质量有保障的综合素质教育。
第一章 机器人与人工智能实践平台介绍
1.2 EP机器人介绍
1.2.1 各式各样的机器人
1.2.2 EP机器人简介
1.2.3 相关赛事:RoboMaster 青少年挑战赛
1.3 基本结构和组成
1.3.1 EP机器人基本结构
1.3.2 EP机器人核心组件
1.3.3 运动控制
1.4 编程软件
1.4.1 RoboMaster EP的连接方法
1.4.2 RoboMaster编程使用方法
1.4.3 大疆教育平台连接EP机器人方法
1.4.4 大疆教育平台的图形化编程
第二章 二轴云台和全向底盘
2.1 云台的功能及其控制
2.1.1 云台的概念与功能
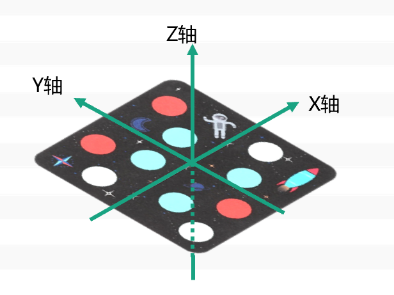
2.1.2 俯仰轴、航向轴、翻滚轴
2.1.3 EP机器人云台的基本组成和工作原理
2.1.4 EP机器人的云台的软件限位和机械限位
2.1.5 EP机器人的云台编程模块
2.2 灵活的麦克纳姆轮底盘
2.2.1 麦克纳姆轮的结构
2.2.2 麦克纳姆轮的运动学原理
2.2.3 麦克纳姆轮底盘的结构
2.2.4 麦克纳姆轮底盘的工作原理
2.2.5 麦克纳姆轮底盘编程模块
2.2.6 电机编址
2.3 扭腰闪避
2.3.1 扭腰闪避的运动姿势与闪避原理
2.3.2 模块类型
2.3.3 编程实现扭腰闪避
2.3.4 小陀螺闪避
2.3.5 装配自定义技能
2.4 全向移动
2.4.1 什么是全向移动
2.4.2 运动叠加原理
2.4.3 基于运动叠加原理编写底盘控制程序
2.4.4 刷锅闪避的运动姿势与闪避原理
2.4.5 编程实现刷锅闪避。
2.4.6 漂移的运动姿态
2.4.7 编程实现漂移甩尾
2.5 闪电突袭
2.5.1 编程实现闪电突袭
2.5.2 体感控制
第三章 信号指示灯和可编程音效控制
3.1 EP机器人上的灯
3.1.1 生活中的各种灯
3.1.2 RGB色彩空间
3.1.3 EP机器人的云台灯、底盘灯、弹道灯
3.1.4 在RoboMaster中编程控制EP机器人灯的颜色(python)
3.2 灯的控制
3.2.1 介绍灯效中的各种模块
3.2.2 循环语句与循环变量
3.2.3 编程控制EP机器人的云台灯逆时针从关闭到依此亮起
3.3 声音的控制
3.3.1 扬声器的原理
3.3.2 EP机器人对讲机的使用方法
3.3.3 EP机器人的多媒体编程模块
3.3.4 让EP唱一首《小星星》
3.4 期中项目——唱唱跳跳的EP
3.4.1 总结前三章的内容
3.4.2 编舞任务的重点知识
3.4.3 介绍编舞案例
第四章 距离、接触、陀螺仪等传感器融合应用
4.1 什么是传感器
4.1.1 传感器
4.1.2 生活中各种各样的传感器
4.1.3 EP机器人的传感器
4.2 装甲板
4.2.1 EP机器人的装甲板
4.2.2 装甲板检测原理
4.2.3 装甲板编程模块
4.3 距离传感器
4.3.1 距离传感器的原理。
4.3.2 距离传感器的安装
4.3.3 距离传感器的编程模块
4.4 陀螺仪
4.4.1 陀螺仪
4.4.2 EP机器人底盘姿态角的获取模块
4.5 反馈
4.5.1 反馈
4.5.2 开环控制和闭环控制
第五章 机器视觉训练及识别方法
5.1 智能的EP
5.1.1 什么是人工智能
5.1.2 人工智能可以完成哪些任务
5.1.3 人工智能技术的发展现状
5.1.4 EP机器人能完成哪些智能任务
5.1.5 学习EP机器人的智能功能需要先掌握哪些基础
5.2 声音识别
5.2.1 声音的本质及传播原理
5.2.2 人工智能声音识别的原理
5.2.3 EP机器人拍手识别
5.3 手势/姿势识别
5.3.1 人工智能姿势识别的原理
5.3.2 编程实现EP机器人手势识别
5.4 视觉标签的识别
5.4.2 认识视觉标签
5.4.3 EP机器人是如何识别视觉标签的
5.4.4 介绍列表的概念和基础用法
5.4.5 使用EP机器人识别视觉标签,并完成瞄准射击任务
5.5 线识别
5.5.1 线识别的基本原理
5.5.2 介绍像素坐标系
5.5.3 使用EP机器人实现线识别
5.5.4 EP机器人线识别的数据格式
5.6 行人/机器人的识别
5.6.1 深度学习图像识别原理
5.6.2 使用EP机器人识别行人/机器人
5.6.3 介绍EP机器人识别到的行人/机器人数据格式
第六章 视觉标签的应用及跟随巡线方法
6.1 视觉标签识别并瞄准
6.1.1 视觉标签的数据格式
6.1.2 用坐标信息近似计算云台角度
6.1.3 使用坐标信息进行瞄准
6.2 视觉标签动态跟随
6.2.1 简单的视觉跟随
6.2.2 P控制跟随
6.2.3 PID优化控制跟随
6.2.4 误差小于一定值时射击
6.3 单线巡线
6.3.1 单线识别数据格式解析
6.3.2 多线识别数据格式解析
6.3.3 使用EP机器人进行巡线
6.4 巡线的拓展
6.4.1 基础的拓展思路
6.4.2 10点考察法
6.4.3 其他判断弯道减速的方法
第七章机械臂和机械爪的应用与编程
7.1 机械臂和机械爪的结构
7.1.1 EP机器人工程形态的组成和结构
7.1.2 连杆的基础知识
7.1.3 机械臂的结构和传动原理
7.1.4 机械爪的结构和传动原理
7.2 舵机
7.2.1 舵机的组成
7.2.2 舵机的控制原理
7.2.3 舵机接入EP机器人的方法
7.2.4 编程控制舵机运动
7.3 机械臂的控制
7.3.1 机械臂运动模型
7.3.2 EP机械臂末端的可达范围
7.3.3 机械臂接入EP机器人的方法
7.3.4 编程控制EP机械臂的方法
7.4 机械爪的控制
7.4.1 机械爪的控制模块
第八章 人工智能在机器人对抗赛中的应用
8.1青少年挑战赛竞赛命题
8.2青少年挑战赛参赛机器人的功能要求
8.3青少年挑战赛竞赛规则
8.4青少年挑战赛竞赛赛道
8.5青少年挑战赛计分规则
8.6青少年挑战赛对抗赛注意事项
六、课程的考核要求
课程重点:是掌握机器人与人工智能的系统理论知识。
课程难点:是机器人与人工智能的应用,开放性工程设计思维的建立和运用其解决问题的能力。
考核要求:了解创新对于世界发展的价值和意义,能快速洞察社会和产业发展中的问题和痛点,理解机器人与人工智能技术构建的原理,掌握机器人与人工智能技术方法的具体实施内容,并能运用机器人与人工智能的工程经验提出解决现实问题的接近“完美”的解决方案。
1、成绩评定总则
本课程考核分为平时考核、实践考核和展示答辩三部分。其中平时成绩占30%,实践考核占40%,展示答辩占30%。
2、平时成绩评定
平时成绩依据学生的课堂出勤率、课堂任务完成情况进行评定。评定时,应充分体现公平、公正、实事求是的原则,客观地评价学生平时的表现。
3、实践考核
大型复杂机器人搭建,注重人工智能的应用;通过视觉识别、机器学习、底盘控制算法和多传感器应用等技术实现复杂、智能机器人自主动作;Python语言程序设计
4、展示答辩
七、课程推荐使用的教材及教学参考资料
《人工智能与机器人技术STEAM教育系列教材—EP机器人拓展与实战》,书号:ISBN 978-7-5668-3822-3,CIP核准号:2023235455,主编 喻晓伶、王伟健、周宇鹏, 暨南大学出版社。


{kind=link}
{kind=link}