
RoboMaster EP | 视觉标签识别与PID
26 5 月, 2025
在物理学中,物体的运动具有相对性,对于同一个物体,由于选取的参照物不同,我们可以将物体看成是运动的或者静止。我们很容易辨别无人机运动的状态,但无人机自身是如何判断自身的运动状态呢?大多数的智能无人机都有自动避障的功能,在无人机视觉世界里面,它是如何判断自身运动状态?无人机的位置定位依据又是什么?以下我们将一起学习无人机定位原理,并研究无人机定位的相关编程技术。
-
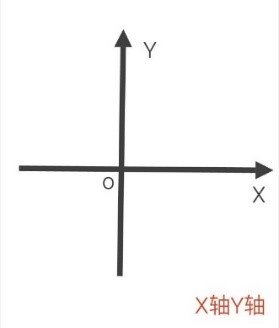
- 平面直角坐标系
-
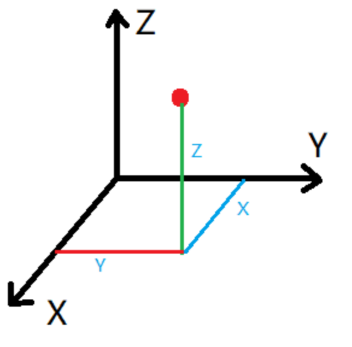
- 三维坐标系
-
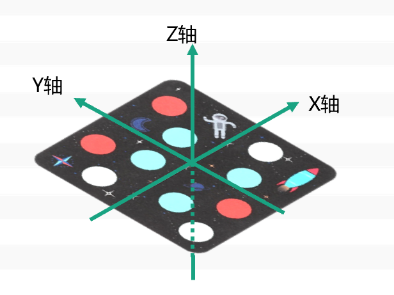
- 挑战卡坐标系
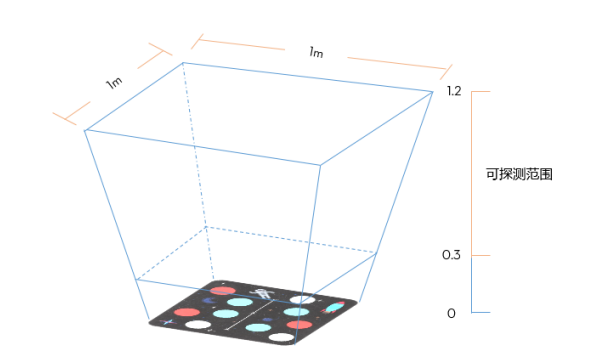
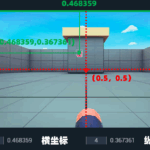
挑战卡识别范围
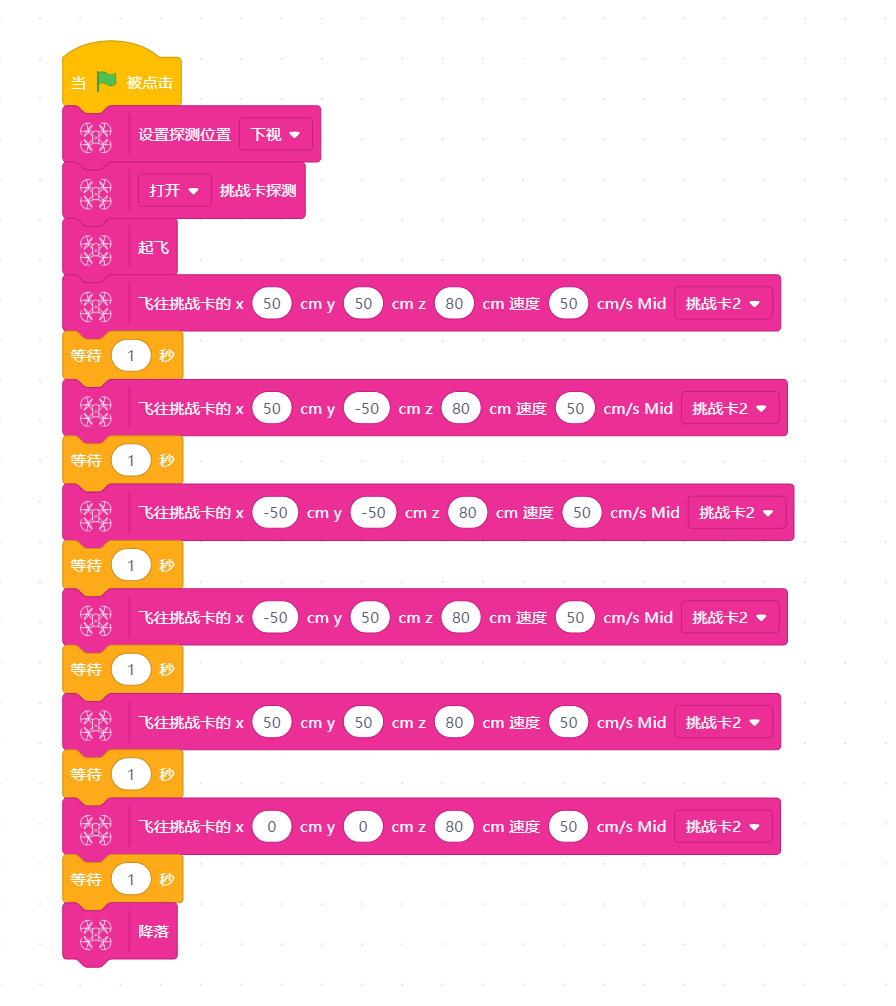
一张挑战卡坐标系的矩形航线


{kind=link}
{kind=link}